
3.1. ドライブレコーダの動画を分析してみた 高尾 英次郎 ‘73機械

私事ですが交通事故に遭いました。事故状況は、自車が制限速度30km/hの二車線道路を右カーブに沿って直進していたところ、左脇道から一時停止しないで出てきた車が側面に衝突したものです。当方が優先道路であることから、一般的に過失割合10 : 90として示談となるケースです。
自車にドライブレコーダーがついており、ビデオ映像(図1)を詳細に見たところ、当方に全く過失がなく もらい事故と確信できる内容でした。
過失0%を主張したところ当方の保険を使わないことになるため、相手方の保険会社との示談交渉を自分で行うことになりました。そこで、交渉を有利に運ぶために、ビデオ映像を分析して速度を明確にし、当方の制限速度遵守と相手車の異常な動きを定量的に把握することにしました。以下にその内容を報告します。

分析には無料で使用できる動画編集ソフト(図2)から1/30秒毎の静止画像を得て、航空写真と合わせて利用することで自車位置と相手車位置を読みとり、速度を求めました。

自車速度を求める
(1) 先ず別途地図ソフト(Google Map)を使って航空写真表示しておきます。
(2) 静止画像から自車ボンネット先端と重なる道路の路面表示やボンネット先端の左右に特徴のある構造物(例:図1の街灯支柱)などが表示されている静止画像を選ぶとともに時刻を読み取る。航空写真上で対応する路面標示や構造物を見つけ出して道路の対応する位置から、車両先端とのずれを補正して自車位置とする。
(3) 適当な路面標示や構造物が無い場合、静止画の電柱とその先に見える家など静止画像上で重なる構造物の組合せ(例:電柱と家屋)を2組見つけ、航空写真上に組の構造物を見つけ出して線を引き、2組の線の交点を得、カメラと車両先端の距離を補正して自車位置とする。
(4) 構造物の組が1組しか見つからない場合は、1組から得られる線と、道路上のカメラ位置軌跡を想定した走行軌跡との交点から自車位置とする。
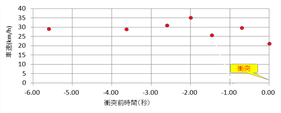
(5) (2)、 (3) または(4)の方法で得たそれぞれの静止画に対応する自車位置間の距離 (図3はGoogle Mapの距離測定機能を利用) と各コマの時刻から得た時間から速度を求める。衝突時刻を基準とする自車速度の変化のプロットを図4に示す。 出来過ぎと言えるほど制限速度30km/hを遵守して走行していたことが分かる。

相手車速度を求める (A方式)
(1) 静止画像上に見える相手車の特徴的なポイントを選ぶ(例:図5の右前ピラー:○)。同じ静止画像上でポイント周辺の特徴的な構造物を2つ選ぶ(例:図5の電柱と街灯支柱)。静止画像上で、ポイントと構造物それぞれを結ぶ水平線を引き2本の線分を得る(黄色矢印線)。
(2) 航空写真上に自車位置と2つの構造物間の2本の直線を引く。 (1)で得た線分長の比率は、自車から見た視角の比率となるから、航空写真上に同比率となるように3本目の線(赤線)引けば、車両の特徴的なポイントを通ることになる。
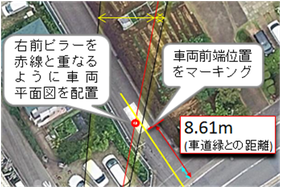
(3) 相手車は、道路中心に居ると仮定して、ポイントの位置を(2)の3本目の直線との交点とし、 カメラと車両先端の距離を補正してマーキングする(図6に当該部分の拡大図を示す)。
(4) 各静止画像から求めたマーキング間の長さを測定して、地図上の距離を求める。図6では車道縁から距離8.61m位置に車両先端位置があると特定できた。 同時に各静止画の時刻からマーキング間の時間を求め、両者を割り算して速度を求める。
相手車速度を求める (B)
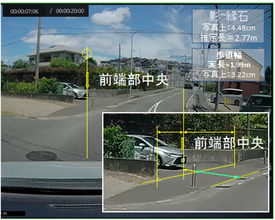
当日は快晴で事故発生日時が7月下旬の正午直前で車両のほぼ真下に鮮明な影が映っている画像が得られたので、車両の影の前端を相手車の車両位置として車両前端位置を特定した。
(1) 車両前端部中央から鉛直線を引き、影前縁との交点を車両前端位置とする。
(2) 上記車両前端位置と車道縁を車両進行方向に合わせて直線で結び(黄色線)長さを測る。同じ線上で歩道縁と車道縁の線分(薄緑線)の長さを測る。
(3) 車道縁と歩道縁の距離(歩道幅=1.99m)を基準として、車両前端位置と車道縁の距離を求める。
(4) 静止画毎に求めた時刻と車道縁からの距離から、静止画間の車速を得る。
相手車速度を求める (C)
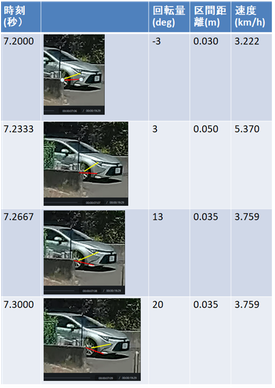
相手車の車輪が、10本のスポークを持つ形式であったことと極低速でスポークの動きが追跡可能であったことを利用して、スポークの回転角から車速を求めた。
(1) 相手車のタイヤ仕様から車輪の動的負荷半径を得て、移動距離の基準となる車輪1回転当たりの車両移動距離を求める。
(2) 静止画の特定のスポークの動きに注目して静止画間の回転角度を測定し(赤線でスポークの回転位置をトレース)、静止画間の時間で除して車輪回転速度を求め、車輪1回転当たりの車両移動距離を乗じて車速を求める。
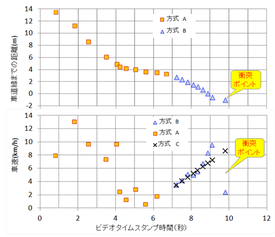
A,B、Cの方式で求めた相手車の速度のプロットを図9に示す。3通りの方法で求めた車速は若干のばらつきはあるものの相手車の動きを定量的に示すことが出来、相手車の不完全な一時停止とその後の漫然運転と言うべき(進入先道路に当方車両が走行していることを無視した)加速状態を明らかにできました。
このデータをもとに資料を作成して示談交渉を進めています。示談交渉資料作成にはAIが役立ちました。